


Agile, Intelligent, Stable



Dive into the scene
Constantly innovating and disrupting



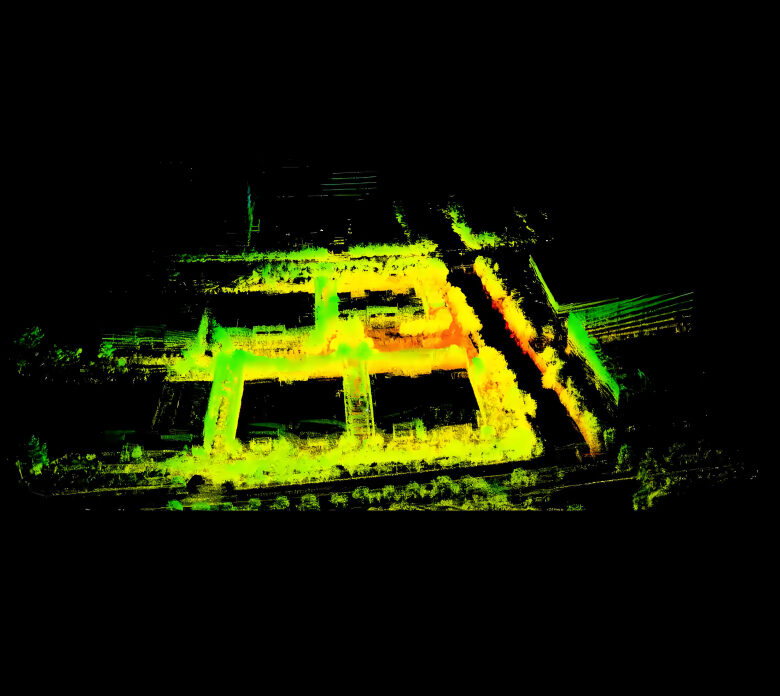
Based on data-driven efficient path planning, AGV uses SLAM laser navigation technology and machine vision to perceive changes in the surrounding environment in real time, and fuses filtering technology to improve the accuracy and robustness of perception data, and at the same time constructs 3D maps of the environment and 3D models of moving targets to adapt to changes in the environment and improve the efficient deployment ability of robots in complex and changeable environments.
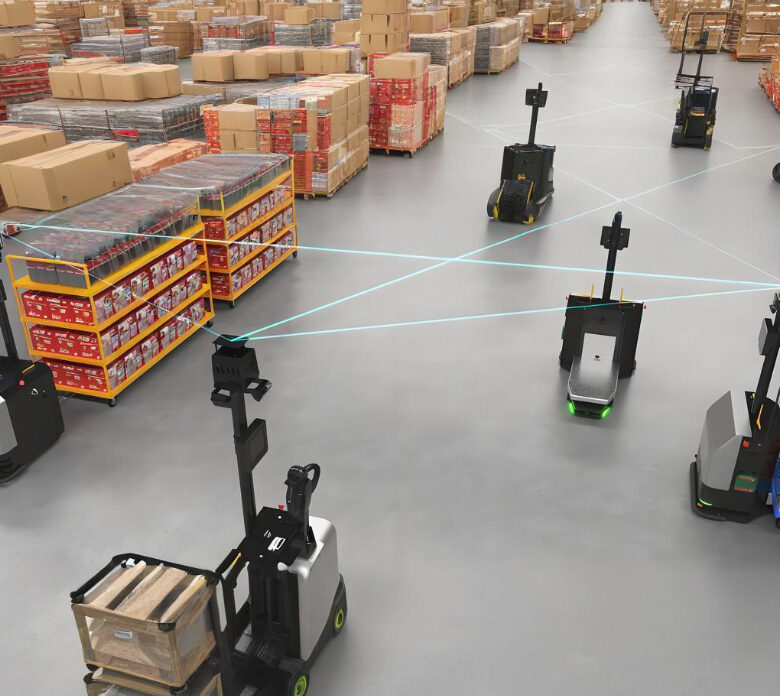
Integrating self-developed laser navigation and perception, multi-axis real-time motion planning and high-precision visual servo control technology, it has the ability of autonomous path planning, obstacle identification and obstacle bypassing, and the body is equipped with multiple safety protections to achieve 360-degree safety obstacle avoidance and ensure the safety of people, vehicles and goods.
Integrating ant colony algorithm and time window control algorithm, it realizes the scheduling of long-term, incremental, cluster unmanned forklifts and different brands of models, and the system's single-cluster scheduling capability reaches the top level.
Constantly innovating and disrupting
The environment is mapped using environmental features, and there is no need to change the operation scene
The multi-type controller accurately tracks the target trajectory and flexibly accelerates and decelerates to ensure smooth operation
Coarse-grained parallel genetic algorithm solves the problem of multi-target task allocation of large-scale AGV